Ổn định quá độ của hệ thống điện máy phát năng lượng gió Trà Vinh v1-3 tại Duyên Hải - Trà Vinh
- Bộ Công Thương họp tìm giải pháp gỡ khó để phát triển điện khí, điện gió ngoài khơi và Hydrogen
- Chuyên gia "hiến kế" cho chính sách phát triển điện khí, điện gió ngoài khơi và sản xuất hydrogen
- Đề nghị làm rõ trách nhiệm trong việc để công ty điện gió xây dựng công trình ngoài phạm vi cấp phép
TÓM TẮT:
Phần lớn những máy phát được sử dụng trong những trạm năng lượng gió là máy cảm ứng. Từ những máy cảm ứng này, một vấn đề quan trọng đặt ra và cần phải giải quyết đó là sự ổn định của hệ thống điện máy những trạm năng lượng gió khi hoạt động. Bài báo này phân tích mô phỏng sự ổn định quá độ của hệ thống điện có máy phát cảm ứng, được thực hiện bởi phần mềm PSCAD/EMTDC.
Từ khóa: máy phát điện từ, hệ thống điện, PSCAD/ EMTDC, mô phỏng ổn định quá độ, máy phát năng lượng gió, Duyên Hải - Trà Vinh.
1. Đặt vấn đề
Gần đây, sự phát sinh năng lượng gió đã tạo ra lợi ích đặc thù và nhiều trạm năng lượng gió đang được khai thác dịch vụ trên thế giới [1]. Trong những trạm năng lượng gió, những máy cảm ứng phần lớn được sử dụng như những máy phát. Một bộ điều khiển giới hạn về góc của máy phát năng lượng gió được trang bị với những tua-bin gió, có một hiệu ứng đáng xem xét trên trạng thái động năng của những máy phát này[2-4]. Mục đích chính của hệ điều khiển giới hạn là đảm bảo đầu ra của những máy phát gió không đổi, hệ điều khiển giới hạn khác còn ngăn chặn máy phát năng lượng gió tăng quá tốc độ cho phép, là trang bị những tua-bin gió một đặc điểm nhằm bảo vệ máy phát năng lượng gió. Tuy nhiên, mục đích của hệ điều khiển mới sẽ không tăng cường sự ổn định quá độ của những máy phát năng lượng gió, mà có thể tự tăng cường sự sự ổn định quá độ. Bài báo này trình bày việc phân tích mô phỏng về sự ổn định quá độ của hệ thống điện có cả máy phát cảm ứng trong suốt thời gian ngắn mạch. Loại mới của hệ thống điều khiển “pitch” được xem xét và hiệu ứng của nó về sự ổn định quá độ được phân tích. Mọi sự mô phỏng đã được thực hiện bằng cách sử dụng phần mềm mô phỏng hệ thống điện, PSCAD/ EMTDC [5].
2. Mô hình sự mô phỏng
2.1. Hệ thống mô hình và điều kiện ban đầu
Hình 1 cho thấy một hệ thống mô hình được dùng trong việc phân tích mô phỏng, trong một máy phát điện đồng bộ (620 MVA, máy nhiệt điện) và một máy phát tua-bin gió (48 MW máy phát cảm ứng, IG) đang cung cấp công suất tới đường dây vô hạn xuyên qua một đường truyền tải với hai mạch đang vận hành ở Duyên Hải - Trà Vinh. Tuy nhiên, trạm năng lượng gió được hợp thành từ nhiều máy phát thực tế, nó được xem xét để được hợp thành một máy phát đơn với tổng dung lượng công suất trong bài báo này. Đó là một đường truyền địa phương với một mạch giữa đường truyền chính và một máy biến thế, TRW, tại trạm năng lượng gió. Những điều kiện ban đầu được tính toán trong PSCAD/ EMTDC, khi máy phát điện đồng bộ được xem xét như một P/V máy phát được thiết lập và máy phát cảm ứng được xem xét như một P/V/Q được thiết lập. Những giá trị xác định được trình bày trong Hình 1.
Hình 1: Mô hình hệ thống
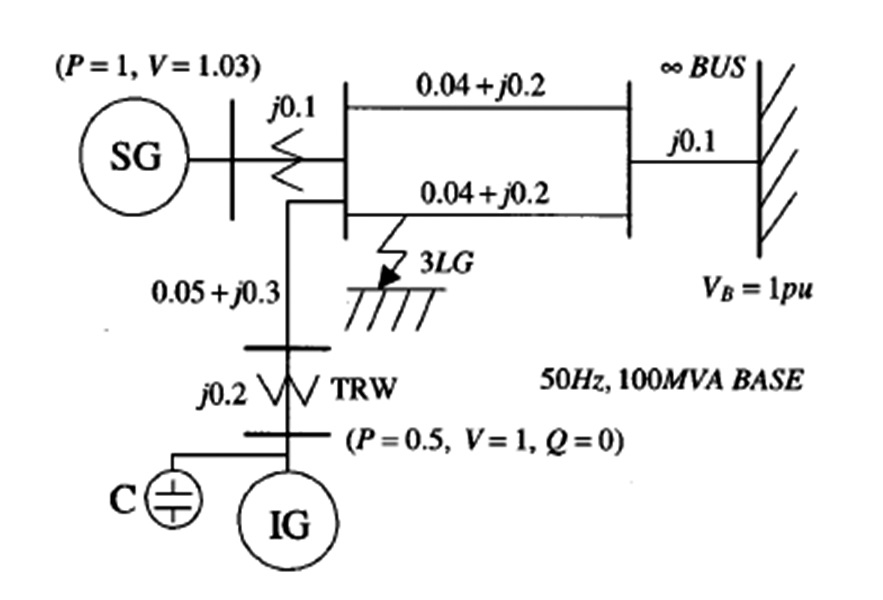
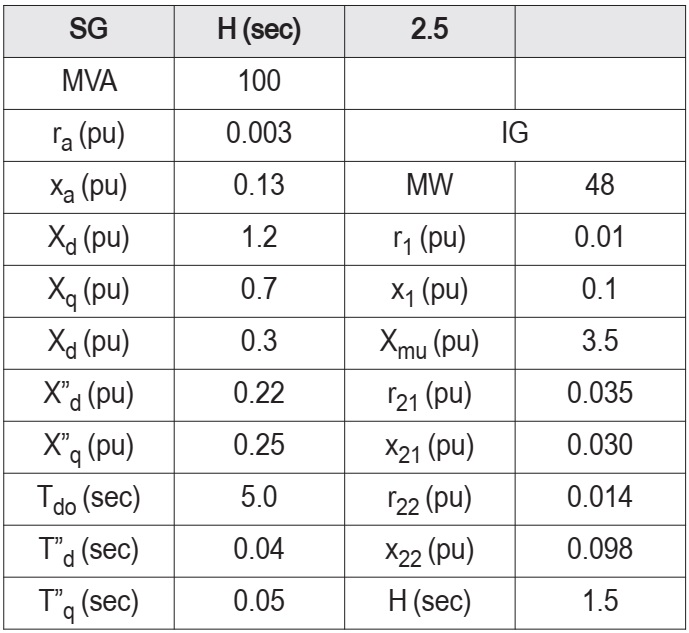
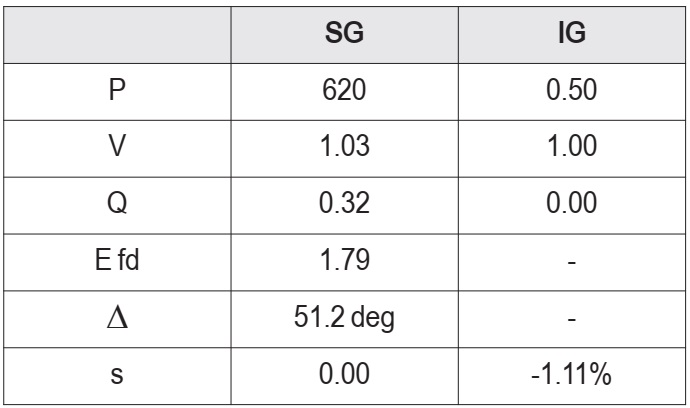
Bộ tụ C được nối với đầu cực của máy phát năng lượng gió để bù công suất phản kháng cho máy phát cảm ứng. Giá trị C đã được lựa chọn để hệ số công suất của trạm năng lượng gió trở nên đồng nhất. Bảng 1 và Bảng 2 biểu diễn các tham số và những điều kiện ban đầu của mỗi máy phát.
Bảng 1. Các phần tử của máy phát
Bảng 2. Các điều kiện đầu của mỗi máy phát
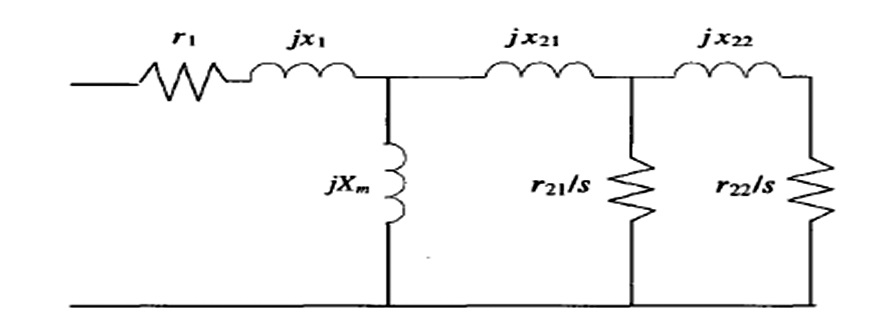
Một mô hình máy cảm ứng hai lồng sóc, đã được trình bày bởi một đương lượng trạng thái tĩnh, mạch trình bày trong Hình 2 ở đó s biểu thị sự trượt quay vòng, được sử dụng cho máy phát sức gió. Sự bão hòa dòng chính của máy phát cảm ứng được xem xét trong những mô phỏng.
Hình 2: Mạch tương đương trạng thái tĩnh
Hình 3: Đặc tính bảo hòa của máy
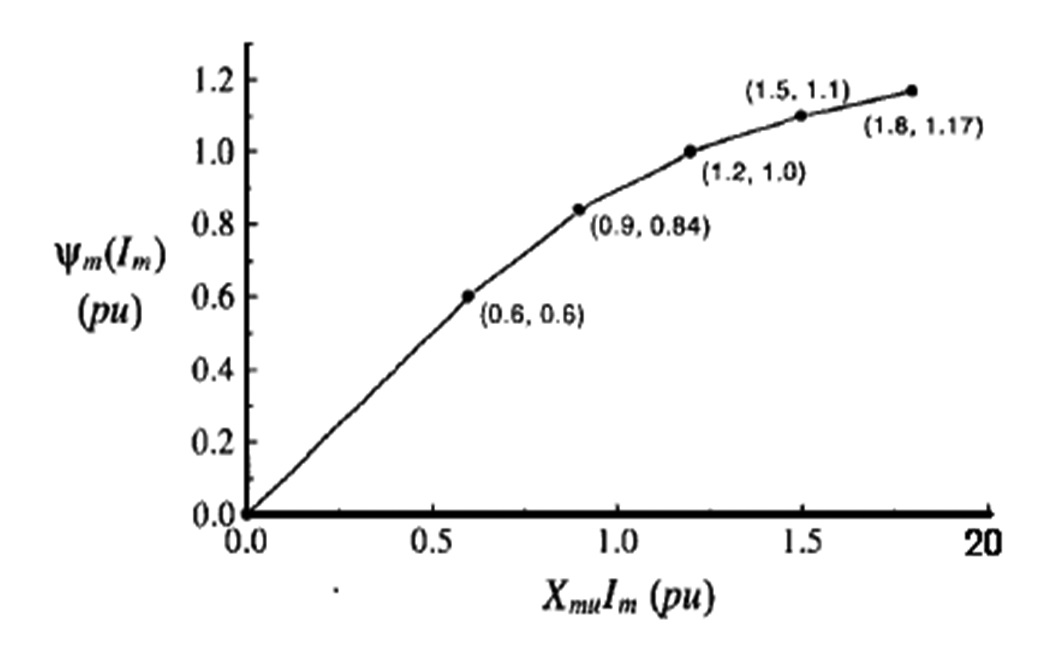
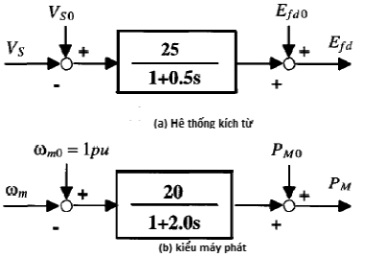
Hình 3 cho thấy đặc tuyến bão hòa của dòng chính Ψm, với sự từ hóa XmuIm, trong đó Xm biểu thị dòng điện kháng từ hóa chưa bão hòa và Im biểu thị dòng từ hóa. AVR và những hệ thống điều tốc được xem xét trong mô hình máy phát điện đồng bộ, vấn đề được đưa vào trong Hình 4.
Hình 4: Mô hình hệ thống điều khiển của máy đồng bộ [6]
2.2. Mô hình tua-bin gió
Nói chung, momen xoắn phát sinh của một tua-bin gió, tw, có thể được biểu thị như sau:
tw = KTCTV2W (1)
Trong đó: KT là một hằng số được xác định bởi mật độ của không khí và bán kính của máy phát gió, CT biểu thị hệ số lực xoắn máy phát gió, và Vw biểu thị tốc độ gió.
Điều được giả thiết trong bài báo này là tốc độ gió không đổi, vì sự biến đổi của tốc độ gió trong thời gian ngắn của sự phân tích về ổn định quá độ có thể được xem như không đáng kể. Bởi vậy momen xoắn phát sinh, tw, có thể được biểu thị như một hàm của hệ số momen xoắn máy phát gió như sau: tw = KTCT (2)
Hệ số momen xoắn máy phát gió, CT, có thể được biểu thị gần đúng bằng cách sử dụng góc bước nhỏ của máy phát gió, bw (độ) và tốc độ góc của máy phát gió, λw như sau [6]:
CT = (C1bw + C2)λw + (C3bw + C4) (3)
Trong đó, C1, 2, 3, 4 là những hằng số. Ở biểu thức trên là một đường tiệm cận của những momen xoắn đặc trưng của máy phát gió thực sự. Bởi vì nó được giả thiết rằng tốc độ gió là hằng số, tốc độ góc của máy phát gió λw, trở thành một hàm chỉ phụ thuộc tốc độ máy phát gió, wm, cái mà được gán là tốc độ máy phát gió trong hệ đơn vị tương đối (pu). Bởi vậy, thế công thức (3) vào trong công thức (2), biểu thức năng suất mới của momen xoắn (pu) phát sinh như sau, trong đó wm cũng biểu thị tốc độ máy phát pu, và b biểu thị góc bước nhỏ pu của máy phát gió.
W = (C’1b + C’2)ωw + (C’3b + C’4) (4)
Tìm hệ số momen máy phát gió của công thức (3) trình bày trong [7], tác giả thực hiện bài báo này đã xác định C’1, C’2, C’3 và C’4 trong công thức (4) như sau:
C’1 = -0.632, C’2 = -0.101, C’3 = -0.373, C’4 = 1.115 (5)
Hình 5: Đặc tính momen tua bin gió
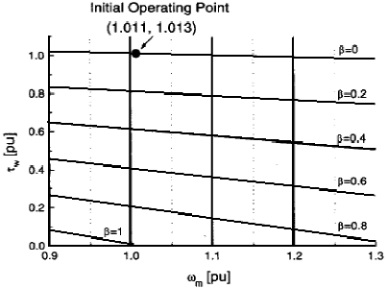
Hình 5 cho thấy những đặc trưng momen xoắn được biểu thị bởi công thức (4) và (5). b đã được bình thường hóa sao cho b là 0 khi máy phát gió được vận hành trong điều kiện trạng thái ổn định được trình bày trong Bảng 2 và khi momen xoắn phát sinh của tua-bin gió là 0 tại cùng tốc độ, như đưa vào trong hình. Momen xoắn cơ bản cho tw (pu) là momen xoắn hiệu dụng của máy phát gió.
Hình 6: Mô hình điều khiển góc kích của Tuabin gió [6]
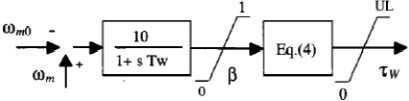
Hình 6 cho thấy hệ điều khiển giới hạn của tua-bin gió được xem xét trong bài báo này. Nói chung, mục đích chính của hệ điều khiển giới hạn là bảo đảm ngỏ ra của góc kích điều khiển là hằng số của máy phát gió. Tuy nhiên, hệ điều khiển này có sai số nhất định vì vậy nó giảm bớt sự ổn định quá độ của máy phát gió, thay vì tăng tốc vì những sự cố ngắn mạch trong hệ thống điện. Mặt khác, hệ điều khiển giới hạn còn để ngăn ngừa máy phát gió vượt quá tốc độ thì phần lớn người ta trang bị cho tua-bin gió các hệ thống bảo vệ nhằm nâng cao độ tin cậy cũng như bảo vệ an toàn cho máy phát điện gió. Tuy nhiên, mục đích của hệ điều khiển mới sẽ không phải tăng cường sự ổn định quá độ của máy phát gió, nó có thể tự tăng cường sự ổn định quá độ. Có vài báo cáo điều tra hiệu ứng của hệ điều khiển giới hạn trên sự nâng cao ổn định quá độ. Trong bài báo này, hệ điều khiển giới hạn trình bày trong Hình 6 được xem xét và hiệu ứng của nó về ổn định quá độ được phân tích. Những khối điều khiển trong Hình 6 có nghĩa, nếu khoảng 10% sự tăng tốc độ máy phát xuất hiện, bộ điều khiển giới hạn giảm bớt momen xoắn tua-bin gió tới 0 với hằng số thời gian Tw (giây). UL biểu thị momen xoắn ngỏ ra tối đa của tua-bin mà được giả thiết để là momen xoắn hiệu dụng của máy phát gió.
4. Kết quả mô phỏng
Hình 7: Kết quả của sự mô phỏng ổn định quá độ
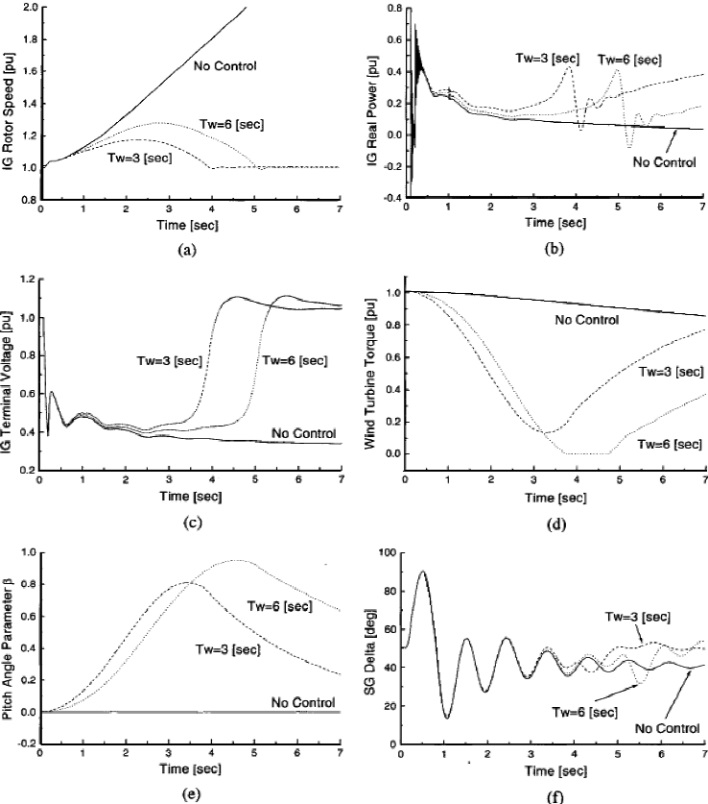
Hình 7 cho thấy những kết quả của sự mô phỏng ổn định quá độ. Điều kiện của sự mô phỏng là một sự cố 3LG (ba đường dây chạm đất) xuất hiện ở thời gian t = 0.1 giây tại đầu đường truyền chính gần máy phát điện đồng bộ và sự cố được ngắt lúc t = 0.2 giây và đóng lại lúc t = 1 giây. Những đáp ứng của tốc độ rôto, công suất phát thực sự, điện áp đầu cực của máy phát cảm ứng được trình bày trong Hình 7(a)-(c); những đáp ứng momen xoắn của tua-bin gió, góc bước nhỏ được trình bày trong Hình 7(d)-(e); và Hình 7(f) cho thấy những đáp ứng của góc công suất máy phát điện đồng bộ.
Những kết quả mô phỏng của 3 trường hợp được trình bày trong mỗi hình, trong lúc "không điều khiển" trình bày cho một trường hợp đặc biệt không có việc xem xét của hệ điều khiển giới hạn và" Tw = 3 hay 6 [giây]" đại diện cho 2 trường hợp với hệ điều khiển bước với hằng số thời gian tương ứng được xem xét. Từ những hình ảnh cho thấy, sự ổn định quá độ của máy phát cảm ứng mạnh thì tùy thuộc vào hệ điều khiển giới hạn. Nếu hệ điều khiển giới hạn không được trang bị với máy phát gió, máy phát cảm ứng tiếp tục tăng tốc, dẫn đến không ổn định. Nếu hệ điều khiển được trang bị, máy phát cảm ứng sẽ ổn định quá độ và có thể trở lại trạng thái nguyên bản.
Trong trường hợp bộ điều khiển giới hạn đáp ứng tương đối chậm với hằng số thời gian Tw = 6 [giây], momen xoắn phát sinh của tua-bin gió giảm đến 0, sau đó máy phát trở lại điều kiện ổn định. Như một kết quả, nó có thể được kết luận hệ điều khiển bước để ngăn ngừa máy phát gió từ sự vượt quá tốc độ gây nên một hiệu ứng quan trọng trong sự nâng cao ổn định quá độ. Mặt khác, rất thú vị khi máy phát điện đồng bộ thì ổn định trong tất cả 3 trường hợp trình bày trong Hình 7(f), trong đó góc công suất (δ) đáp ứng của máy phát được trình.
5. Kết luận
Các phân tích mô phỏng trình bày trong bài báo này về ổn định quá độ của hệ thống điện có máy phát gió trong suốt thời gian ngắn mạch. Hệ điều khiển giới hạn ngăn ngừa máy phát gió vượt quá tốc độ được xem xét và hiệu ứng của nó trên sự ổn định quá độ được phân tích. Những nhận xét sau đây được tồn tại như một kết luận sau:
1- Sự ổn định quá độ của máy phát cảm ứng lớn thì tùy thuộc vào hệ điều khiển “pitch”. Hệ điều khiển giới hạn còn ngăn ngừa máy phát gió vượt quá tốc độ là một hiệu ứng quan trọng để nâng cao ổn định quá độ của những máy phát gió.
2- Trạng thái động của những máy phát gió không có hiệu ứng quan trọng như trên sự ổn định của những máy phát điện đồng bộ.
TÀI LIỆU THAM KHẢO:
- Huỳnh Nhơn (2016). Thiết kế nhà máy điện và trạm biến áp. TP. Hồ Chí Minh” NXB Đại học Quốc gia TP Hồ Chí Minh.
- Phần mềm PSCAD/EMTDC, Trung tâm nghiên cứu HVDC Manitoba, 1994
- Vũ Gia Hanh, Trần Khánh Hà, Phan Tử Thụ, Nguyễn Văn Sáu (1998). Máy điện tập I, II. Hà Nội: NXB Khoa học và Kỹ thuật.
- S. Heier (1998). Grid Integration of Wind Energy Conversion Systems. USA: John Wiley & Sons Ltd., Hoboken.
- R. S. Rao, S. Venkata, L. Narasimham, M. R. Raju, and a S. Rao (2011). Optimal Network Reconfiguration of Large-Scale Distribution System Using Harmony Search Algorithm. IEEE Transactions on Power Systems, 26(3), 1080-1088.
- Prabha Kundur (1994). Power System Stability and Control. USA: McGraw-Hill International Editions.
TRANSITIONAL STABILITY OF TRA VINH V1-3
WIND ENERGY GENERATOR POWER SYSTEM IN DUYEN HAI - TRA VINH
• Master. NGUYEN NGOC TIEN
Tra Vinh University
ABSTRACT:
Most electric generators used in wind power stations are induction generators. Hence, an important issue that arises and needs to be resolved is the stability of the electrical system of wind power stations during their operations. This study presents the simulation of the transient stability of a power system with induction generators using PSCAD/EMTDC software.
Keywords: electromagnetic generator, power system, PSCAD/ EMTDC, transient stability simulation, wind energy generator, Duyen Hai - Tra Vinh.
[Tạp chí Công Thương - Các kết quả nghiên cứu khoa học và ứng dụng công nghệ, Số 23 tháng 10 năm 2023]
 0
0

(CHG) TS. Nguyễn Thanh Mai, Trưởng bộ môn Kỹ năng tham gia giải quyết vụ án hình sự, Học viện Tư pháp, đã có những phân tích sâu sắc về hành vi khách quan của tội sản xuất, buôn bán hàng giả, cũng như những “vùng trống” pháp lý còn tồn tại trong Bộ luật Hình sự hiện hành.
Xem chi tiết
(CHG) Ngày 21/6/2025, tại Hà Nội, Tạp chí điện tử Kỹ thuật Chống hàng giả và Gian lận thương mại (CHG) đã tổ chức buổi gặp mặt thân mật nhân kỷ niệm 100 năm Ngày Báo chí cách mạng Việt Nam. Đây là dịp để tri ân, ôn lại truyền thống vẻ vang của nền báo chí cách mạng, đồng thời khẳng định vai trò, sứ mệnh và trách nhiệm xã hội của Tạp chí trong công cuộc phòng, chống hàng giả, gian lận thương mại và buôn lậu trong thời kỳ mới.
Xem chi tiết
(CHG) Ngày 21/6/1925, tờ báo Thanh Niên do lãnh tụ Nguyễn Ái Quốc sáng lập đã chính thức ra đời, đánh dấu sự khai sinh của nền báo chí cách mạng Việt Nam. Từ đó đến nay, 100 năm đã trôi qua, một thế kỷ của bản lĩnh, dấn thân, sáng tạo và đồng hành cùng dân tộc. Nhìn lại chặng đường vẻ vang ấy, chúng ta không chỉ tri ân những người làm báo qua các thời kỳ mà còn thấy rõ vai trò của báo chí trong việc xây dựng, bảo vệ Tổ quốc và chấn hưng đất nước trong thời kỳ mới.
Xem chi tiết
(CHG) Năm 2025 đánh dấu một cột mốc lịch sử đặc biệt: tròn 100 năm Ngày Báo chí Cách mạng Việt Nam. Trên hành trình một thế kỷ đồng hành cùng sự nghiệp cách mạng, phát triển và bảo vệ Tổ quốc, báo chí cách mạng Việt Nam không chỉ là “vũ khí tư tưởng” sắc bén, mà còn là tuyến đầu trong nhiều cuộc đấu tranh không tiếng súng. Đặc biệt, trong bối cảnh hàng giả, hàng nhái, gian lận thương mại và buôn lậu ngày càng tinh vi, báo chí tiếp tục phát huy vai trò tiên phong, trở thành cánh tay nối dài của các lực lượng chức năng, cùng xã hội xây dựng môi trường kinh doanh lành mạnh, bảo vệ quyền lợi chính đáng của người tiêu dùng.
Xem chi tiết
(CHG) Tại buổi họp báo về tình hình kinh tế, xã hội TP HCM chiều 5/6/2025, câu phát biểu ngắn gọn nhưng đầy trăn trở của ông Nguyễn Quang Huy, Chi cục phó Quản lý thị trường TP HCM đã gây chú ý mạnh mẽ trong dư luận: “Nhiều tiểu thương coi tiền phạt như một phần chi phí kinh doanh”.
Xem chi tiết
Mới nhất







.jpg)
.jfif)

